Cuando un dedo toca el borde afilado de una hoja o se acerca a una taza caliente, el cuerpo reacciona de forma inmediata. Esa capacidad de respuesta, resultado de millones de años de evolución, es una de las habilidades más complejas de replicar en un robot. Sin embargo, un nuevo desarrollo tecnológico podría cambiar las reglas del juego: investigadores británicos han creado una piel robótica capaz de detectar con precisión estímulos como presión, temperatura, daño físico e incluso el tipo de contacto que recibe.
Este avance, publicado en la revista Science Robotics, presenta una piel electrónica fabricada a partir de un hidrogel conductor moldeable, que ha sido sometido a pruebas extremas: fue cortado con bisturí, golpeado, quemado y presionado con instrumentos metálicos. El objetivo no era torturar al invento, sino demostrar su capacidad para interpretar y clasificar distintas sensaciones táctiles. Y lo logró: más de 1,7 millones de señales recogidas permitieron entrenar un sistema capaz de distinguir entre un simple roce, una presión aislada o una quemadura localizada.
¿Qué hace tan especial a esta piel robótica?
Las pieles electrónicas no son un concepto nuevo, pero sí lo es su nivel de funcionalidad. Hasta ahora, la mayoría de sensores usados en robótica requerían varios tipos de componentes específicos para detectar distintas sensaciones: un sensor de presión, otro de temperatura, otro para vibraciones. Esta nueva piel sintetiza todo eso en un solo material y una única capa, gracias a una técnica llamada tomografía de impedancia eléctrica (EIT, por sus siglas en inglés).
El secreto está en cómo se organiza la información dentro del material. Según explican los autores, "monitorizando todas las configuraciones posibles entre los electrodos, podemos identificar cuáles aportan más información sobre cada tipo de estímulo". Esto permite estructurar los datos recogidos de forma más eficiente, algo fundamental cuando se trabaja con millones de canales de información simultánea.
Además, la piel no está compuesta por múltiples materiales pegados entre sí, como ocurre con otros diseños que tienden a romperse o delaminarse. Está hecha de un solo tipo de hidrogel elástico y autorreparable, lo que la hace más resistente y adaptable a diferentes formas, como manos humanas, superficies curvas o incluso rostros de robots humanoides.

Conductividad que imita al cuerpo humano
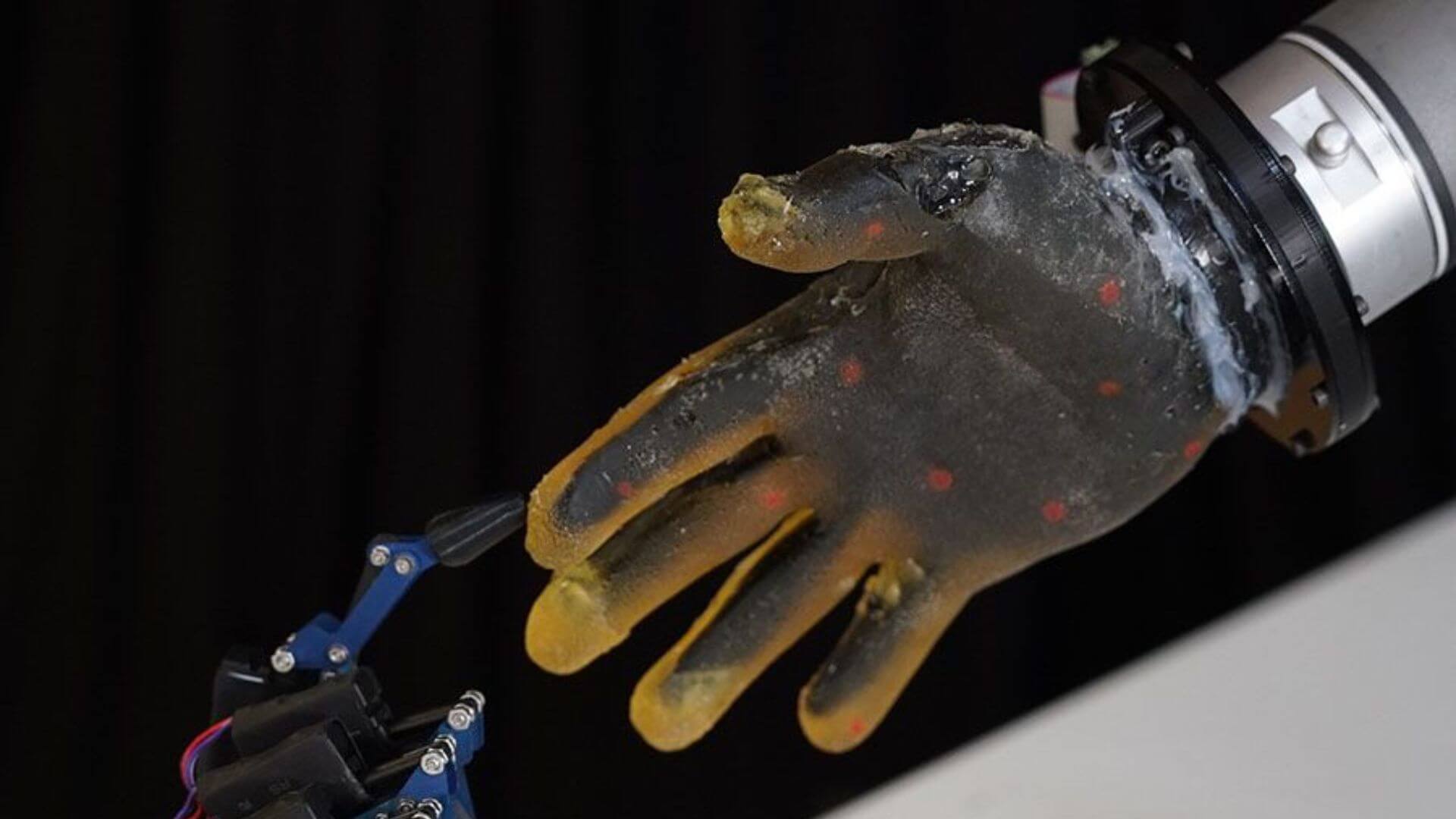
Una de las pruebas clave fue fundir el hidrogel en forma de una mano humana a tamaño real. En ella se colocaron 32 electrodos distribuidos alrededor de la muñeca, sin necesidad de insertar cables ni sensores adicionales en los dedos o la palma. A través de estas conexiones, los investigadores pudieron leer la forma en la que el campo eléctrico cambiaba cuando alguien tocaba la mano, la calentaba o la dañaba.
Cada uno de esos cambios modificaba la conductividad eléctrica del hidrogel de forma distinta según el tipo de contacto, como ocurre en la piel humana. Por ejemplo, una incisión con bisturí reducía bruscamente la conductividad, mientras que un objeto metálico aumentaba la transmisión del campo eléctrico. “Dañar la membrana reduce localmente su conductividad a cero, generando la mayor respuesta medida”, detallan los autores.
No solo se trataba de detectar un estímulo, sino también de localizar con precisión el punto de contacto, diferenciar si se trataba de una o varias zonas presionadas, e incluso reconocer cuándo una zona se calentaba y luego se enfriaba. El sistema de aprendizaje automático desarrollado fue capaz de interpretar todas estas variaciones en tiempo real, sin necesidad de reconstruir mapas complejos.
De los dedos al entorno: sensores ambientales incluidos
Uno de los aspectos más sorprendentes de esta piel electrónica es que no solo puede captar sensaciones táctiles. También es capaz de medir condiciones ambientales como la temperatura y la humedad, algo que resulta clave en escenarios como el rescate de personas, la exploración espacial o la interacción humano-robot en entornos cambiantes.
Durante una prueba de 100 horas en el laboratorio, los investigadores recopilaron datos ambientales de forma continua y comprobaron cómo estos factores modificaban de manera predecible la señal eléctrica del hidrogel. Con tan solo 50 canales de información seleccionados mediante algoritmos estadísticos, una red neuronal pudo predecir con alta precisión la temperatura y humedad en cada momento.
Esto significa que un robot equipado con esta piel podría “sentir” tanto lo que le toca como el clima que lo rodea, sin sensores adicionales ni cambios en el hardware. Esa integración multimodal —tacto, temperatura, humedad y daño— en una sola capa representa una mejora radical en la eficiencia y funcionalidad de los sistemas robóticos blandos.

Localización precisa de estímulos en superficies complejas
En robótica, detectar el toque no es suficiente: también es esencial saber dónde se ha producido. En este caso, los autores lograron una precisión destacable. La piel artificial fue capaz de localizar un toque humano sobre la mano robótica con un margen de error promedio inferior a 25 milímetros en un área de 38.000 mm², según los mapas de activación creados con los datos recogidos.
Esta precisión se obtuvo incluso en zonas alejadas de los electrodos, como las puntas de los dedos, donde el campo eléctrico es más débil. Para compensarlo, el sistema priorizó automáticamente los canales más sensibles, mejorando así el rendimiento sin necesidad de añadir sensores extra o modificar la forma física del robot.
En palabras del equipo, “la estructura de información del sistema permite identificar y procesar estímulos multimodales, mejorar la eficiencia de la localización táctil y transferir conocimientos entre modalidades”. Este enfoque de diseño basado en datos ofrece una ventaja clave frente a métodos anteriores más rígidos y menos escalables.
Aplicaciones futuras y retos por resolver
Este desarrollo abre la puerta a una nueva generación de robots más sensibles, versátiles y seguros, especialmente en contextos donde la interacción con humanos o entornos frágiles es frecuente. Prótesis inteligentes, asistentes médicos, brazos robóticos para cirugías delicadas o vehículos autónomos con capacidad de percepción del entorno son solo algunas de las aplicaciones posibles.
No obstante, todavía quedan retos por resolver. El hidrogel, aunque estable durante semanas, puede verse afectado por cambios prolongados de humedad o temperatura. Además, las zonas de conexión entre los electrodos y el robot deben seguir perfeccionándose para evitar fallos por fatiga del material o del cableado.
Aun así, el modelo de diseño propuesto —una piel blanda, continua y capaz de aprender con pocos datos— representa un cambio de paradigma. Frente al enfoque tradicional basado en sensores separados y materiales rígidos, esta propuesta demuestra que menos puede ser más, si se estructura bien la información.
Referencias
- David Hardman, Thomas George Thuruthel, Fumiya Iida. Multimodal Information Structuring with Single Layer Soft Skins and High-Density Electrical Impedance Tomography. Science Robotics. DOI: 10.1126/scirobotics.adk1162.



