En los fondos marinos, un pulpo explora, caza y se camufla con una destreza que ningún otro animal logra. Sus brazos, más que simples extremidades, son herramientas multifuncionales capaces de retorcerse, alargarse, acortarse y doblarse al servicio de comportamientos tan variados como cazar un cangrejo, mover piedras o esconderse entre corales. Un solo organismo despliega una flexibilidad que la robótica aún sueña alcanzar.
Un equipo internacional de investigadores ha analizado cientos de horas de vídeo de pulpos en hábitats naturales del Caribe y España para entender cómo logran esta coordinación. Lejos de un espectáculo caótico de tentáculos en movimiento, los científicos descubrieron un sistema jerárquico sorprendentemente eficiente: de cuatro deformaciones básicas surgen doce acciones de los brazos, y de esas combinaciones, un amplio repertorio de conductas complejas.
Este hallazgo no solo desvela secretos de la biología marina. Los brazos de los pulpos se han convertido en modelo vivo para el diseño de robots blandos, una tecnología que podría revolucionar campos tan distintos como la medicina, la exploración submarina o las operaciones de rescate.
Cuatro movimientos para todo un repertorio
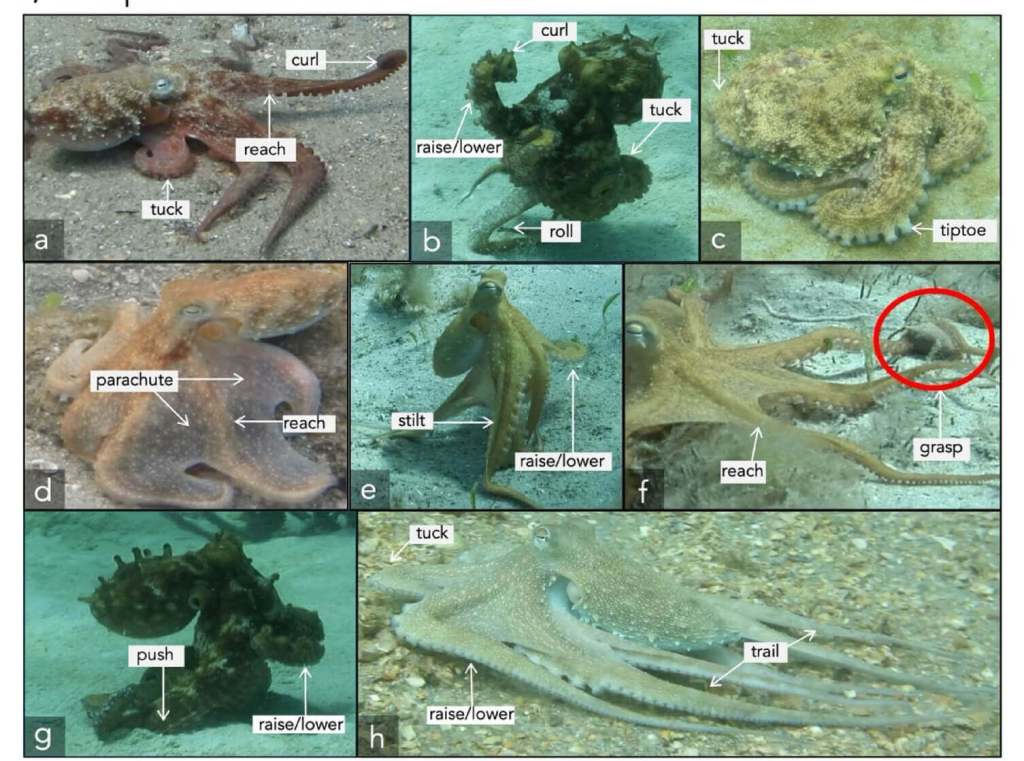
Los investigadores clasificaron los gestos de los brazos en cuatro deformaciones: acortar, alargar, doblar y torsionar. Aunque parezcan simples, estas “primitivas” pueden combinarse en infinitas variaciones. De movimientos elementales emergen conductas extraordinarias.
Durante la observación de 25 pulpos en seis localizaciones distintas, los científicos registraron casi 4.000 acciones de brazos y más de 6.800 deformaciones. Cada tentáculo, independientemente de su posición, fue capaz de ejecutar cualquiera de las deformaciones, pero con cierta especialización.
Las partes distales —las más cercanas a las ventosas— eran maestras del doblado, mientras que las zonas proximales, cerca del cuerpo, se especializaban en el alargamiento.
Esta organización funcional permite a los pulpos realizar tareas simultáneas con varios brazos: mientras unos exploran, otros sostienen el cuerpo o preparan un ataque. El secreto no está en la fuerza, sino en la coordinación.
Inteligencia distribuida bajo el agua
A diferencia de los humanos, los pulpos no dependen de un cerebro central que controle cada movimiento. Gran parte de sus neuronas se distribuye en los brazos y las ventosas, lo que les permite reaccionar de forma autónoma y rápida al entorno. Cada brazo piensa por sí mismo, pero trabaja en conjunto.
El estudio mostró que las acciones no se reparten de manera aleatoria: los brazos delanteros se emplean más para explorar y alcanzar, mientras que los traseros se encargan de tareas de soporte o locomoción. Esta división parcial del trabajo sugiere que los pulpos optimizan energía y tiempo al mover su cuerpo.
Para los ingenieros, este modelo resulta fascinante. Imagina un robot quirúrgico capaz de que cada brazo responda con autonomía, ajustándose en tiempo real a la presión o textura de los tejidos. El control distribuido reduce la necesidad de cálculos centrales complejos, lo que podría simplificar el diseño de máquinas flexibles y eficientes.
Un laboratorio en el arrecife
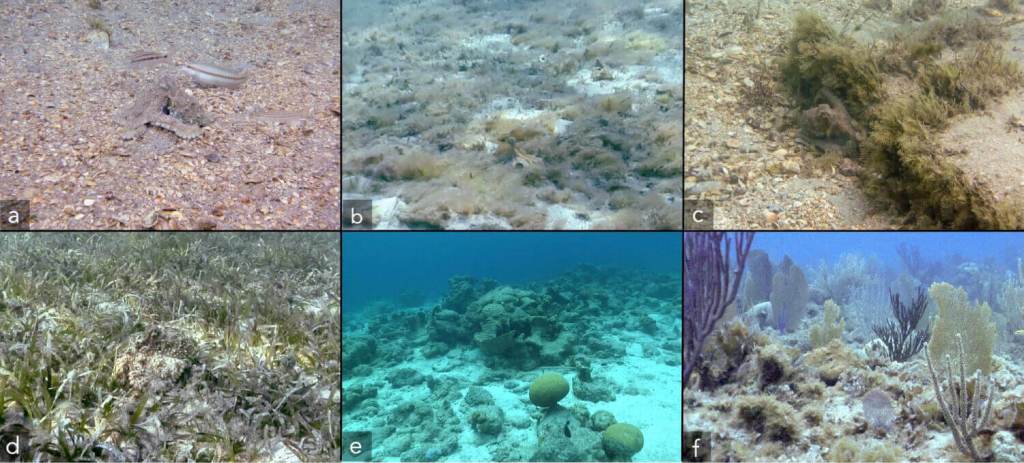
Una de las claves de este trabajo es que las observaciones se hicieron en hábitats naturales: arrecifes, praderas marinas, fondos arenosos y zonas de coral.
A diferencia de los experimentos en acuarios, los pulpos fueron grabados en plena acción, enfrentándose a la diversidad y el caos del mar. El campo reveló lo que el laboratorio no podía mostrar.
Los animales no solo se movían para cazar, sino también para construir refugios, camuflarse con algas o defenderse de depredadores. Cada acción exigía una combinación diferente de deformaciones y brazos, lo que permitió a los científicos construir un “etograma” detallado, una especie de mapa de comportamientos.
Este registro exhaustivo mostró que la flexibilidad no es un truco ocasional, sino una estrategia constante. La naturaleza ha perfeccionado durante millones de años un sistema de adaptabilidad extrema.
Del mar a los robots blandos
Los ingenieros de robótica blanda llevan tiempo inspirándose en los pulpos. Su capacidad de moverse sin huesos rígidos ofrece pistas para diseñar brazos artificiales que puedan operar en espacios reducidos, manipular objetos delicados o moverse entre escombros tras un desastre. El pulpo es un manual viviente para la robótica del futuro.
La nueva investigación aporta una ventaja clave: ahora se sabe qué combinaciones básicas dan lugar a conductas complejas. Esto podría traducirse en algoritmos más simples y eficientes para controlar robots blandos.
En lugar de programar cada movimiento, bastaría con definir reglas de combinación entre deformaciones básicas.
Así, robots médicos podrían intervenir en cirugías mínimamente invasivas con la misma destreza con la que un pulpo extrae un cangrejo de su guarida. Y en el océano, dispositivos inspirados en tentáculos podrían inspeccionar arrecifes frágiles sin dañarlos. La ingeniería empieza a hablar el lenguaje del pulpo.
Una revolución flexible por delante
El estudio, publicado en Scientific Reports, demuestra que incluso un animal aparentemente enigmático puede ofrecer lecciones prácticas para la tecnología. Los brazos del pulpo nos recuerdan que la simplicidad bien organizada puede superar a la complejidad artificial.
Aunque aún queda camino por recorrer —desde materiales capaces de imitar la textura muscular hasta sistemas energéticos que permitan movimientos sostenidos—, el potencial es enorme.
Los investigadores sugieren que futuros estudios comparen distintas especies de pulpos, incluidas las de brazos largos y delgados, para ampliar el repertorio de inspiración.
La próxima generación de robots podría nacer de la misma lógica que guía a un pulpo en los arrecifes: adaptarse, improvisar y sobrevivir gracias a la flexibilidad. En un futuro no muy lejano, los tentáculos del mar podrían estar operando en quirófanos, explorando planetas o rescatando vidas.
Referencias
- Bennice, C.O., Buresch, K.C., Grossman, J.H. et al. Octopus arm flexibility facilitates complex behaviors in diverse natural environments. Sci Rep. (2025). doi: 10.1038/s41598-025-10674-y



