
Una escena clásica de ciencia ficción muestra a una máquina reconstruyéndose con piezas del entorno tras una batalla. Esa imagen, que parecía una fantasía cinematográfica, ha comenzado a tomar forma en el mundo real. Un grupo de ingenieros de la Universidad de Columbia ha dado un paso decisivo hacia un futuro donde los robots no solo piensan, sino también se regeneran, se adaptan y crecen como si fueran organismos vivos.
En un estudio publicado en Science Advances, los investigadores presentan una plataforma robótica capaz de modificar su forma, absorber partes de otras máquinas e incluso repararse tras una caída. Esta propuesta no se basa en sensores ultraavanzados ni en materiales exóticos, sino en un principio simple: construir robots a partir de módulos intercambiables que permiten la autoconstrucción, el crecimiento y la recuperación. Los autores lo llaman "metabolismo robótico" y lo consideran una pieza fundamental para lograr la verdadera autonomía física de las máquinas.
¿Qué es el metabolismo robótico?
A diferencia de los robots actuales, que están encerrados en cuerpos rígidos e inmutables, el sistema propuesto permite que las máquinas funcionen como sistemas abiertos. Es decir, pueden tomar materiales del entorno o de otros robotspara crecer o reponerse. Según los autores, "la única provisión externa al metabolismo robótico es energía y material en forma de robots o partes de robots". En otras palabras, no hay intervención humana directa ni componentes nuevos externos: solo piezas compatibles que pueden ser reutilizadas.
Esta forma de operar se inspira directamente en la biología. Las células vivas incorporan nutrientes, desechan residuos y se reparan constantemente. El metabolismo robótico busca replicar esa lógica a través de módulos simples llamados Truss Links, capaces de acoplarse magnéticamente entre sí, de forma libre y sin necesidad de alineaciones precisas. Estos bloques permiten a las estructuras robóticas cambiar de forma, adaptarse a entornos y hasta regenerarse después de un daño.
Los Truss Links: piezas simples para comportamientos complejos
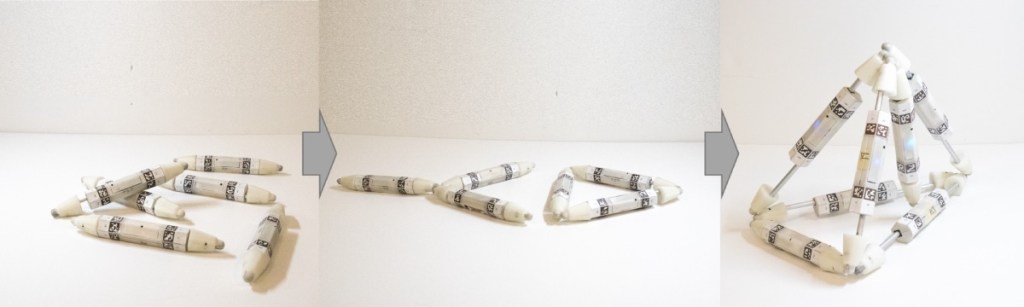
Los Truss Links son barras alargadas equipadas con imanes esféricos en sus extremos, que pueden unirse entre sí en múltiples direcciones. Cada módulo es capaz de expandirse, contraerse y conectarse con otros sin necesidad de ayuda externa. Esta flexibilidad permite crear estructuras tridimensionales complejas a partir de configuraciones básicas en dos dimensiones.
En los experimentos, se demostró cómo robots construidos con Truss Links pasaban de formar un triángulo plano a convertirse en un tetraedro. Luego, ese mismo robot era capaz de incorporar un nuevo módulo, que le servía como "bastón" para mejorar su movilidad en pendientes. La mejora era notable: el robot con la nueva configuración aumentó su velocidad en un 66,5% al bajar por una rampa de 10° .
Además, los investigadores comprobaron que estas estructuras no solo se arman, sino que también pueden recuperarse tras una caída. Al dejar caer un robot desde una altura moderada, las piezas se separaban, pero luego eran capaces de reconectarse y restablecer su forma original, en una especie de autorreparación física asistida por sus propias capacidades motrices.

Autonomía sin intervención humana
Uno de los aspectos más interesantes del estudio es que los robots no requieren herramientas externas para crecer o recomponerse. Todos los movimientos de ensamblaje, desplazamiento y reconfiguración se realizan utilizando solo sus propios motores, baterías y conexiones magnéticas. En este sistema, la ayuda externa está permitida solo si proviene de otros robots compatibles.
Esto fue demostrado cuando un robot en forma de tetraedro ayudó a otro a transformarse desde una configuración plana en 2D a una estructura tridimensional. La asistencia entre robots sugiere que, en el futuro, podríamos tener ecosistemas robóticos donde las máquinas colaboran entre sí para crecer o autorrepararse en función de las necesidades del entorno.

El experimento en etapas: del módulo suelto al organismo complejo
Los investigadores diseñaron un entorno de pruebas dividido en cuatro niveles. En el primer nivel, varios módulos independientes se ensamblaban para formar un triángulo y una estrella de tres puntas. Luego, estas dos estructuras se unían para formar una figura llamada "rombo con cola", que era capaz de transformarse en un tetraedro al caer desde un borde y replegarse sobre sí misma. En la etapa final, el tetraedro encontraba un nuevo módulo y lo integraba para formar una versión mejorada de sí mismo, un "tetraedro de trinquete" que podía desplazarse más rápido .
Este proceso simula, de manera mecánica, algo parecido al desarrollo embrionario o la evolución física de un organismo. Cada etapa representa una mayor capacidad funcional. Mientras un solo módulo apenas puede desplazarse en línea recta, una estructura tridimensional ya puede subir pendientes, esquivar obstáculos y realizar tareas más complejas.
Desafíos técnicos y limitaciones actuales
Pese a lo prometedor del sistema, el propio equipo reconoce que se trata de un desarrollo aún incipiente. Los Truss Links actuales son relativamente grandes y caros: cada uno cuesta más de 200 dólares, lo que limita su escalabilidad. Además, el sistema aún requiere intervención humana para ciertas tareas, como el control por teclado o la preparación del entorno experimental.
Otro reto es el paso a una mayor miniaturización. Los autores creen que, en el futuro, estos sistemas podrían reducirse al punto de que millones de módulos microscópicos formen parte de un solo robot. Para llegar a ese nivel, es necesario mejorar los actuadores, diseñar circuitos personalizados y aumentar la capacidad de procesamiento en cada módulo .
También está en desarrollo una simulación más sofisticada, capaz de modelar los cambios de forma, las interacciones físicas y las decisiones de ensamblaje. Esto permitirá entrenar algoritmos de inteligencia artificial que no solo tomen decisiones lógicas, sino que también planifiquen cómo modificar el cuerpo del robot para cumplir un objetivo.
Una nueva dimensión para la inteligencia artificial
Hasta ahora, la inteligencia artificial se ha centrado en el cerebro: reconocimiento de voz, visión artificial, planificación y aprendizaje automático. Sin embargo, este estudio propone una expansión radical: permitir que los robots no solo aprendan, sino que transformen su cuerpo físicamente. Según los autores, "plataformas capaces de metabolismo robótico proporcionan un equivalente físico a la inteligencia artificial que se mejora a sí misma" .
Esto podría tener aplicaciones en entornos extremos como la exploración espacial, la recuperación en desastres o la construcción en terrenos difíciles, donde la adaptación física puede ser tan importante como la capacidad de razonamiento. En esos escenarios, un robot que puede repararse o modificarse sin ayuda humana es mucho más valioso que uno dependiente de repuestos específicos o herramientas externas.
De la ciencia ficción a la ingeniería real
Aunque hablar de robots que se reparan a sí mismos puede sonar a película futurista, este trabajo ofrece una base técnica concreta y replicable. Lejos de imaginar androides con piel líquida, los investigadores están proponiendo una ingeniería modular basada en principios simples pero poderosos, que se inspiran en la vida biológica para resolver problemas prácticos.
Como advierte uno de los autores, Hod Lipson, la idea de robots autorreplicantes puede evocar escenarios oscuros. Pero en la práctica, esta tecnología busca resolver un problema real: en un mundo cada vez más automatizado, ¿quién va a reparar a los robots cuando fallen? La respuesta, según este estudio, es clara: otros robots.
Referencias
- Philippe Martin Wyder, Riyaan Bakhda, Meiqi Zhao, Quinn A. Booth, Matthew E. Modi, Andrew Song, Simon Kang, Jiahao Wu, Priya Patel, Robert T. Kasumi, David Yi, Nihar Niraj Garg, Pranav Jhunjhunwala, Siddharth Bhutoria, Evan H. Tong, Yuhang Hu, Judah Goldfeder, Omer Mustel, Donghan Kim, Hod Lipson. Robot metabolism: Toward machines that can grow by consuming other machines. Science Advances, 16 July 2025, Vol. 11, eadu6897. DOI: 10.1126/sciadv.adu6897.



