Cuando usamos el GPS para buscar una dirección o seguir una ruta, pocas veces pensamos en su fragilidad. Basta con que estemos en un túnel, una zona remota o que haya interferencias para que desaparezca nuestra ubicación. A gran escala, esta vulnerabilidad puede tener consecuencias graves: desde desorientar aviones hasta comprometer operaciones militares. En situaciones críticas, depender únicamente de señales satelitales no siempre es una opción segura.
Esto lo tienen claro los científicos de Q-CTRL, una empresa australiana que ha desarrollado un sistema de navegación completamente nuevo, llamado MagNav. Funciona sin satélites, no puede ser interferido y, según las pruebas, es hasta 50 veces más preciso que los sistemas de respaldo actuales. La tecnología se basa en principios de la física cuántica y en el uso del campo magnético terrestre como referencia de navegación. Los resultados del trabajo se publicaron en abril de 2025 en el servidor arXiv y suponen un hito en el campo de las tecnologías de posicionamiento.
Navegar con el campo magnético de la Tierra
El principio detrás del sistema MagNav es conocido desde hace tiempo: el campo magnético terrestre no es uniforme. Existen pequeñas variaciones, llamadas anomalías magnéticas, que dependen de la geología local y que pueden ser detectadas y registradas en mapas de referencia. Si se dispone de sensores lo bastante sensibles, se pueden comparar las mediciones locales con esos mapas para saber con precisión dónde se encuentra un objeto.
El reto, hasta ahora, había sido técnico. Los magnetómetros disponibles eran demasiado ruidosos o poco estables, y el ruido generado por los propios vehículos impedía obtener lecturas fiables. Además, los algoritmos de comparación entre los datos medidos y los mapas eran poco robustos. El sistema MagNav resuelve estos problemas combinando sensores cuánticos diseñados por Q-CTRL con algoritmos de aprendizaje en tiempo real que filtran el ruido y se adaptan a cada vehículo y entorno.
En palabras de los autores, “nuestro enfoque combina los procesos de eliminación de ruido y comparación con el mapa en un solo paso, en lugar de separar esos procesos”. Esto permite que el sistema se calibre automáticamente sin necesidad de maniobras específicas, algo que otras tecnologías de navegación magnética sí requieren.
Tecnología cuántica en sensores ultracompactos
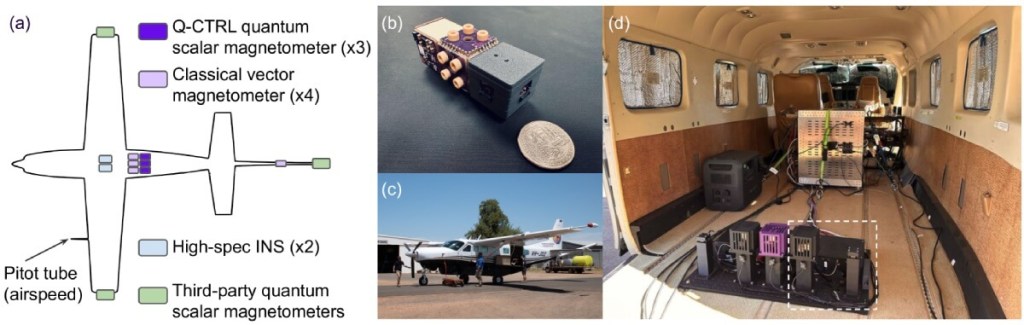
El corazón de MagNav está en sus sensores cuánticos, en concreto en magnetómetros de rubidio. Estos dispositivos funcionan gracias al fenómeno de precesión del espín atómico, que puede detectarse ópticamente. Son increíblemente sensibles: su límite de detección es inferior a 80 femtoteslas por raíz de hertzio, una unidad que mide cuán pequeños pueden ser los cambios de campo que detectan.
Cada sensor tiene apenas una masa de 70 gramos y un volumen de 144 cm³. Puede instalarse en cualquier tipo de vehículo, desde coches hasta aviones, pasando por drones. Esta miniaturización es clave para su uso práctico. Durante las pruebas realizadas, los investigadores colocaron los sensores tanto dentro como fuera de una avioneta Cessna, y comprobaron que incluso en condiciones de alta interferencia magnética, el sistema era capaz de mantener una precisión superior a la de los mejores sistemas inerciales disponibles.
Además, MagNav no emite ningún tipo de señal. Esto lo convierte en un sistema pasivo y, por tanto, invisible a radares o dispositivos enemigos, una ventaja estratégica clave en entornos militares o sensibles.

Pruebas reales: del aire al asfalto
Para validar el sistema, el equipo de Q-CTRL realizó pruebas tanto en vuelo como en tierra. Las pruebas aéreas se llevaron a cabo en una avioneta que recorrió más de 6700 kilómetros a distintas altitudes, entre el nivel del suelo y los 19.000 pies. En las condiciones más exigentes, el sistema MagNav logró un error de posicionamiento final de tan solo 22 metros, lo que representa el 0,006 % de la distancia total recorrida.
En el artículo se afirma que “la mayor ventaja lograda (∼46×) se obtiene utilizando magnetómetros cuánticos montados externamente, con referencia a un INS asistido por velocidad vectorial”. Esto significa que el sistema MagNav fue 46 veces más preciso que uno de los mejores sistemas inerciales comerciales disponibles. Incluso en condiciones menos favorables, con sensores montados en el interior del avión, se obtuvieron mejoras de entre 11 y 38 veces frente a los INS tradicionales.
También se realizaron pruebas sobre el terreno, en caminos asfaltados y de grava al sur de Orange, en Nueva Gales del Sur. En estas condiciones —con un vehículo estándar sin aislamiento frente a vibraciones ni ruido electromagnético— el sistema MagNav logró una precisión 7 veces superior al INS, lo que representa un resultado sin precedentes en navegación terrestre por anomalías magnéticas.

Adaptabilidad en tiempo real y robustez operativa
Una de las características más destacadas del sistema es su capacidad de adaptación. A diferencia de otros métodos que necesitan una calibración previa o maniobras especiales para aprender el comportamiento magnético del vehículo, MagNav aprende en tiempo real. Esto se debe a un modelo físico que estima continuamente cómo el propio vehículo distorsiona el campo magnético terrestre, ajustando sus cálculos sobre la marcha.
Según el paper, “el algoritmo comienza sin conocimiento previo de las características magnéticas del vehículo, aparte de suposiciones físicas plausibles”. A medida que avanza la misión, el sistema actualiza sus parámetros de forma autónoma. Esto permite iniciar la navegación sin calibración previa ("modo frío") o aprovechar configuraciones anteriores ("modo caliente") si el vehículo ya ha sido utilizado antes.
Este enfoque, basado en modelos físicos en lugar de técnicas puramente estadísticas, mejora la robustez frente a cambios en la carga, el rumbo o la latitud. También permite operar en regiones donde el campo magnético es más complejo, como zonas polares o bajo condiciones de clima espacial adverso.
Limitaciones actuales y futuro prometedor
Aunque los resultados son impresionantes, los autores no ocultan las limitaciones actuales. El sistema depende de la existencia de mapas magnéticos detallados y fiables, que no siempre están disponibles en todo el mundo, especialmente sobre los océanos. Además, en regiones donde hay pocas variaciones magnéticas, el sistema puede tardar más en precisar la ubicación.
Otro factor es el impacto del clima espacial, como tormentas solares, que pueden alterar temporalmente el campo magnético y afectar a la precisión. Sin embargo, los algoritmos están diseñados para identificar estos eventos y minimizar su impacto.
El equipo de Q-CTRL considera que combinar esta tecnología con otros sistemas —como los visuales o basados en radar— podría dar lugar a soluciones de navegación aún más robustas. Por ahora, MagNav demuestra que es posible navegar con gran precisión sin depender de satélites ni señales externas, algo que parecía impensable hasta hace poco.
Referencias
- Murat Muradoğlu, Mattias T. Johnsson, Nathanial M. Wilson, Yuval Cohen, Dongki Shin, Tomas Navickas, Tadas Pyragius, Divya Thomas, Daniel Thompson, Steven I. Moore, Md Tanvir Rahman, Adrian Walker, Indranil Dutta, Suraj Bijjahalli, Jacob Berlocher, Michael R. Hush, Russell P. Anderson, Stuart S. Szigeti, Michael J. Biercuk. Quantum-assured magnetic navigation achieves positioning accuracy better than a strategic-grade INS in airborne and ground-based field trials. arXiv (2025). https://doi.org/10.48550/arXiv.2504.08167.